2️⃣ VPG
Learning Objectives
- Understand the Policy Gradient Theorem
- Understand the VPG algorithm: how to perform on-policy policy gradient
- Implement VPG using PyTorch, on the CartPole environment
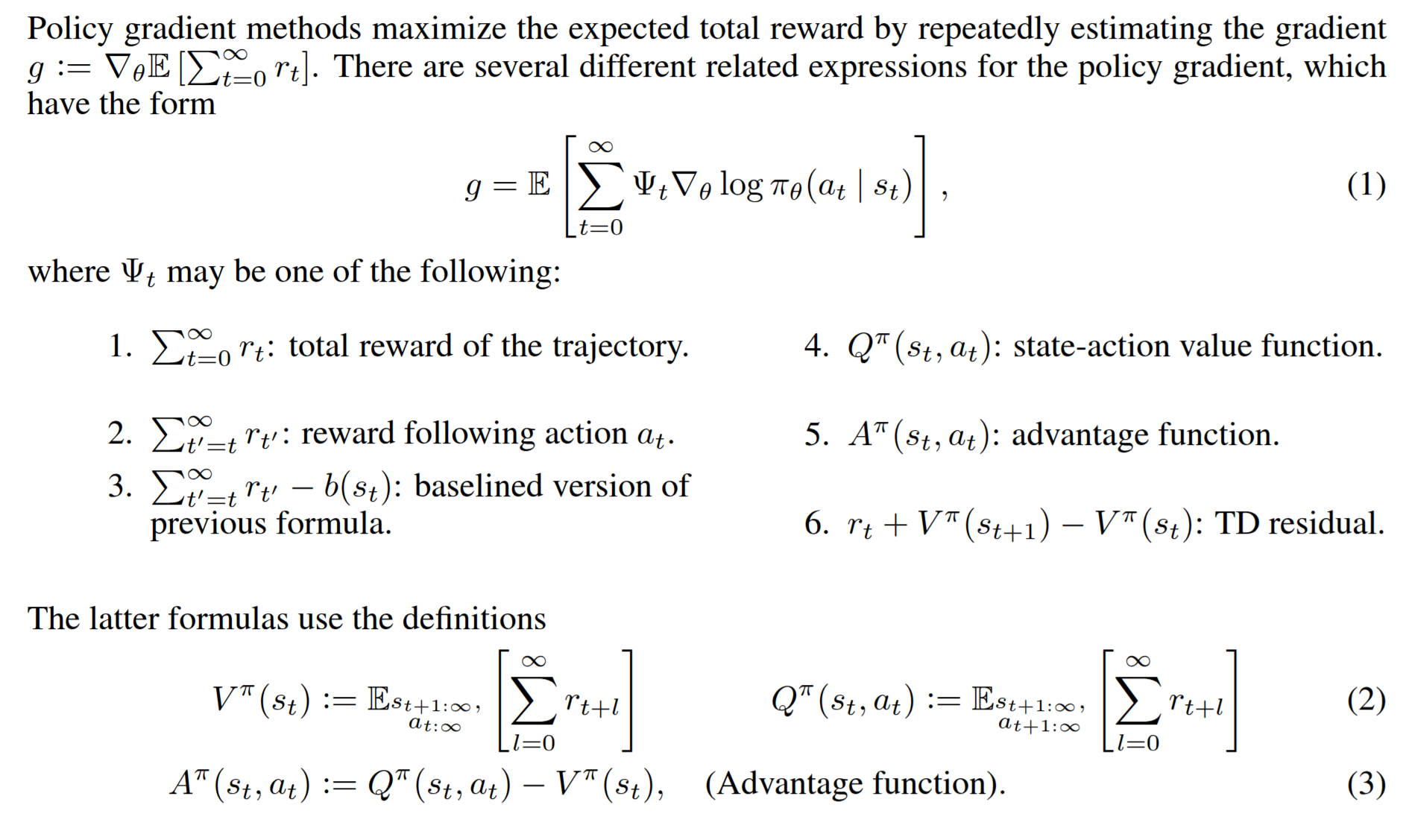
Policy Gradient Theorem
Instead of learning action-values and deriving a policy (as in Q-learning or DQN), policy gradient methods learn the policy directly.
- Policy is parameterized: $\pi_\theta(a|s)$ with parameters $\theta$ (often a neural network).
- Objective: Choose $\theta$ to maximize expected return $J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta}[G(\tau)]$ (joy), where $\tau$ is a trajectory and $G(\tau)$ its return.
We would desire to update the policy directly via gradient ascent against $J(\theta)$:
The problem is that the return is a sum of rewards from the trajectory, and the trajectory itself is a result of sampling from the policy, over and over, as well as being dependant on the environmental distribution, which we do not have access to. There is no clear way to directly compute the gradient of the return with respect to the policy parameters. The solution here is the policy gradient theorem, which states that we can instead use the return weighted by the gradient of the log-probability as an unbiased estimator of the gradient of the return.
Derivation
The probability of sampling a trajectory $\tau = (s_0, a_0, s_1, a_1, \dots, s_T)$ is given by
The dynamics $\mu$ do not depend on $\theta$, so:
Thus:
Plugging back into the gradient:
This is the Vanilla Policy Gradient estimator, also called REINFORCE. Each $\log \pi_\theta(a_t|s_t)$ is multiplied by the full return $G(\tau)$. However, the action $a_t$ cannot influence rewards before time $t$, only those afterwards. This means that all the rewards before timestep $t$ merely add noise, as no changes to the policy can affect them. To reduce variance, replace $G(\tau)$ with the return $G_t$ at timestep $t$, also called the reward-to-go:
Thus, the lower-variance unbiased estimator is:
There are many other variants of the policy gradient estimator, as described in Schulman, 2018.
Implementation
We make use of the same CartPole environment as before, but now we have a vectorized version that is entirely defined in terms of tensor operations (see chapter2_rl/exercises/gpu_env.py). This environment is identical to the one used for DQN, but it now runs entirely on the GPU. This means
* we don't need to constantly convert between numpy and torch tensors
* we can run large numbers of environments in parallel (~thousands of environments for ~millions of environmental steps per second)
* we avoid copying data back and forth between the CPU and GPU, which can be a significant bottleneck
Policy Network
Here, the policy is learned directly as a neural network, rather than learning a Q-value table approximator. We'll use the same architecture as the Q-network from DQN, so we've just included that here for you.
class PolicyNetwork(nn.Module):
"""
For consistency with your tests, please wrap your modules in a `nn.Sequential` called `layers`.
"""
layers: nn.Sequential
def __init__(self, obs_shape: tuple[int], num_actions: int, hidden_sizes: list[int] = [120, 84]):
super().__init__()
# assert len(obs_shape) == 1, f"Expecting a single vector of observations, got {obs_shape}"
assert len(hidden_sizes) == 2, f"Expecting 2 hidden layers, got {len(hidden_sizes)}"
self.layers = nn.Sequential(
nn.Linear(obs_shape[-1], hidden_sizes[0]),
nn.ReLU(),
nn.Linear(hidden_sizes[0], hidden_sizes[1]),
nn.ReLU(),
nn.Linear(hidden_sizes[1], num_actions),
)
def forward(self, x: Tensor) -> Tensor:
return self.layers(x)
net = PolicyNetwork(obs_shape=(4,), num_actions=2)
summary(net)
Rollout Buffer
The way that our implementation of VPG will work is simple: we perform a rollout across num_envs many environments in parallel, and store the trajectories for each. We then learn from that set of rollouts, and then discard it afterwards. One rollout, one learning step. This means we are always learning on-policy: we only every learn from data that the current model actually generated. We will use a rollout buffer to store the trajectories.
Exercise - implement Rollout Buffer
The Rollout class will store a set of num_envs many trajectories. We do not shuffle up anything, or break up a episode into little experiences as we did for DQN. The smallest datapoint is one full trajectory:
The following methods need to be completed:
add_step- adds information gathered from timestep $t$ to the rollout bufferget_batches- returns a list ofRolloutTensorsobjects, each containingbatch_sizemany trajectories.
We store the tensors for each step as seperate lists, and then stack once at the end to get the final tensors with the .get function. This ends up being cheaper as it avoids spinning up indexed-write kernels per step.
Hint
Use t.split to write get_batches.
RolloutTensors = namedtuple("RolloutTensors", ["obs", "actions", "logprobs", "rewards", "dones"])
class Rollout:
_obs: list[Float[Tensor, " max_steps *obs_shape"]]
_actions: list[Int[Tensor, " max_steps *action_shape"]]
_logprobs: list[Float[Tensor, " max_steps"]]
_rewards: list[Float[Tensor, " max_steps"]]
_dones: list[Bool[Tensor, " max_steps"]]
timestep: int
def __init__(
self, num_envs: int, max_steps: int, obs_shape: tuple[int], action_shape: tuple[int], device: t.device
):
"""
Args:
num_envs: number of environments to rollout
max_steps: maximum number of steps to rollout per environment
obs_shape: shape of the observation
action_shape: shape of the action
device: device to use
"""
self.MAX_SIZE = max_steps
# Per-step we append tensor references to Python lists (free) and t.stack() once at the
# end, instead of 5 indexed-write kernels per step into a preallocated buffer. Each stored
# tensor is freshly produced per step (the env returns a new state tensor each step), so
# holding references is safe. This removes ~2500 tiny kernel launches per full rollout.
self._obs, self._actions, self._logprobs, self._rewards, self._dones = [], [], [], [], []
self.timestep = 0
def add_step(
self,
obs: Float[Tensor, " num_envs *obs_shape"],
actions: Int[Tensor, " num_envs *action_shape"],
logprobs: Float[Tensor, " num_envs"],
rewards: Float[Tensor, " num_envs"],
dones: Bool[Tensor, " num_envs"],
infos: dict[str, Any],
):
"""
Adds information to the replay buffer for the current self.timestep
Don't forget to increment self.timestep afterwards!
"""
if self.timestep >= self.MAX_SIZE:
raise ValueError("Rollout is full, cannot add more steps")
raise NotImplementedError()
def reset(self):
self._obs.clear(); self._actions.clear(); self._logprobs.clear()
self._rewards.clear(); self._dones.clear()
self.timestep = 0
def get(self) -> tuple[Tensor, ...]:
"""
Stack the per-step lists into (num_envs, timestep, ...) tensors. Rollouts can stop early
(see gen_rollout), so the time dimension is however many steps were actually collected.
"""
assert self.timestep > 0, "Rollout is empty"
return RolloutTensors(
t.stack(self._obs, dim=1),
t.stack(self._actions, dim=1),
t.stack(self._logprobs, dim=1),
t.stack(self._rewards, dim=1).float(),
t.stack(self._dones, dim=1),
)
def get_batches(self, batch_size: int) -> list[RolloutTensors]:
"""
Splits the rollout buffer into batches of size `batch_size`, and returns a list of
`RolloutTensors` objects, each containing `batch_size` many trajectories.
"""
raise NotImplementedError()
tests.test_rollout(Rollout)
Solution
RolloutTensors = namedtuple("RolloutTensors", ["obs", "actions", "logprobs", "rewards", "dones"])
class Rollout:
_obs: list[Float[Tensor, " max_steps *obs_shape"]]
_actions: list[Int[Tensor, " max_steps *action_shape"]]
_logprobs: list[Float[Tensor, " max_steps"]]
_rewards: list[Float[Tensor, " max_steps"]]
_dones: list[Bool[Tensor, " max_steps"]]
timestep: int
def __init__(
self, num_envs: int, max_steps: int, obs_shape: tuple[int], action_shape: tuple[int], device: t.device
):
"""
Args:
num_envs: number of environments to rollout
max_steps: maximum number of steps to rollout per environment
obs_shape: shape of the observation
action_shape: shape of the action
device: device to use
"""
self.MAX_SIZE = max_steps
# Per-step we append tensor references to Python lists (free) and t.stack() once at the
# end, instead of 5 indexed-write kernels per step into a preallocated buffer. Each stored
# tensor is freshly produced per step (the env returns a new state tensor each step), so
# holding references is safe. This removes ~2500 tiny kernel launches per full rollout.
self._obs, self._actions, self._logprobs, self._rewards, self._dones = [], [], [], [], []
self.timestep = 0
def add_step(
self,
obs: Float[Tensor, " num_envs *obs_shape"],
actions: Int[Tensor, " num_envs *action_shape"],
logprobs: Float[Tensor, " num_envs"],
rewards: Float[Tensor, " num_envs"],
dones: Bool[Tensor, " num_envs"],
infos: dict[str, Any],
):
"""
Adds information to the replay buffer for the current self.timestep
Don't forget to increment self.timestep afterwards!
"""
if self.timestep >= self.MAX_SIZE:
raise ValueError("Rollout is full, cannot add more steps")
# `infos` is intentionally not stored: it is never read during training, and the env
# builds a fresh GPU clone in it every step (memory + overhead for nothing).
self._obs.append(obs)
self._actions.append(actions)
self._logprobs.append(logprobs)
self._rewards.append(rewards)
self._dones.append(dones)
self.timestep += 1
def reset(self):
self._obs.clear(); self._actions.clear(); self._logprobs.clear()
self._rewards.clear(); self._dones.clear()
self.timestep = 0
def get(self) -> tuple[Tensor, ...]:
"""
Stack the per-step lists into (num_envs, timestep, ...) tensors. Rollouts can stop early
(see gen_rollout), so the time dimension is however many steps were actually collected.
"""
assert self.timestep > 0, "Rollout is empty"
return RolloutTensors(
t.stack(self._obs, dim=1),
t.stack(self._actions, dim=1),
t.stack(self._logprobs, dim=1),
t.stack(self._rewards, dim=1).float(),
t.stack(self._dones, dim=1),
)
def get_batches(self, batch_size: int) -> list[RolloutTensors]:
"""
Splits the rollout buffer into batches of size `batch_size`, and returns a list of
`RolloutTensors` objects, each containing `batch_size` many trajectories.
"""
tau = self.get() # filled portion only
obs = t.split(tau.obs, batch_size, dim=0)
acts = t.split(tau.actions, batch_size, dim=0)
logprobs = t.split(tau.logprobs, batch_size, dim=0)
rewards = t.split(tau.rewards, batch_size, dim=0)
dones = t.split(tau.dones, batch_size, dim=0)
batches = [RolloutTensors(*tensors) for tensors in zip(obs, acts, logprobs, rewards, dones)]
return batches
tests.test_rollout(Rollout)
VPG Args
We've provided a dataclass for the training arguments, and will explain as needed later on.
@dataclass
class VPGArgs:
# Basic / global
seed: int = 1
env_id: str = "CartPole-gpu"
# Wandb / logging
use_wandb: bool = False
wandb_project_name: str = "VPGCartPole"
wandb_entity: str | None = None
video_log_freq: int | None = 50 # every N rollouts, render a 4x4 grid video of the rollout
# (logged to wandb if use_wandb, shown inline if live_viz)
# Duration of different phases / buffer memory settings
total_timesteps: int = 500_000
# max_rollout_steps: int = 500
# min_rollout_steps: int = 64
num_envs: int = 4
num_steps_per_rollout: int = 128
lr: float = 2.5e-4
gamma: float = 1
frac_dead_rollout: float = 1
ent_coef: float = 0.01
max_grad_norm: float = 0.5
rollout_use_count: int = 4
num_minibatches: int = 4
clip_coef: float = 0.2
compile: bool = False
device: str = "cpu"
normalize_returns: bool = True
show_probs: bool = False
num_batches_per_rollout: int = 1
# LR decay settings
use_lr_decay: bool = False
lr_end: Optional[float] = None
lr_frac: Optional[float] = None
use_iw: bool = False
early_stop: bool = True # cut a rollout short once every env has died at least once
full_reset: bool = True # fully reset all envs at the start of each rollout
live_viz: bool = False # also display the logged grid video inline (notebook only)
def __post_init__(self):
self.batch_size = self.num_envs // self.num_batches_per_rollout
self.device = t.device(self.device)
if self.use_lr_decay:
assert self.lr_end is not None, "lr_end must be set if use_lr_decay is True"
assert self.lr_frac is not None, "lr_frac must be set if use_lr_decay is True"
self.env_steps_per_update = self.num_steps_per_rollout * self.num_envs // self.num_batches_per_rollout
if not self.use_iw:
assert self.rollout_use_count == 1, "rollout_use_count must be 1 if use_iw is False"
assert self.num_batches_per_rollout == 1, "num_batches_per_rollout must be 1 if use_iw is False"
VPG Agent
The following class will be our agent, that will generate rollouts via interaction between the agent and environment, as well as generate actions my sampling them from the policy network. Recall that the policy network now maps observations to logits for each action, so we can sample actions from the distribution.
Exercise - implement VPGAgent
Implement the functions:
* gen_rollout - this function computes the episode rollout, by interacting with the environment for args.num_steps_per_rollout steps. If an episode terminates, we reset the environment and continue. We will track the length of the episode in the lifespan variable, which indicates how long each episode runs before termination. For the cartpole environment, this will allow us to track performance (the longer the cart lives, the better it does.)
get_actions- this function takes in an observation, and returns the actions, logprobs, and entropy for that observation. You can uset.distributions.Categorical(logits=logits)to construct a distribution, from which you can get the actions, logprobs, and entropy. See the docs for details.
Internally, this function also tracks dead and lifespan, which are tensors of shape (num_envs,) that indicate whether each environment is dead and how long each environment has survived respectively.
This will be useful for displaying later on during training so we can get an idea of how long each rollout lasts for.
class VPGAgent:
"""Base Agent class handling the interaction with the environment."""
dead: Bool[Tensor, " num_envs"]
lifespan: Int[Tensor, " num_envs"]
def __init__(
self,
envs: gym.Env,
policy_network: PolicyNetwork,
args: VPGArgs,
rng: Optional[np.random.Generator] = None,
):
self.envs = envs
self.policy_network = policy_network
self.rng = rng
self.args = args
self.obs_shape = envs.observation_space.shape
self.action_shape = envs.action_space.shape
@t.no_grad()
def gen_rollout(self, rollout: Rollout) -> tuple[Rollout, dict[str, Any]]:
"""
Compute the full episode rollout for all environments in parallel, adding them to the rollout buffer.
It then returns the rollout buffer, and a dictionary of info contining the lifespan.
Returns `infos` (list of dictionaries containing info we will log).
"""
device = self.args.device
# Force a *full* reset so every env starts a fresh episode aligned to this rollout's window
# (otherwise the env's internal timestep persists across rollouts and survivors truncate
# mid-rollout). CartPole resets every env whose terminated|truncated flag is set.
if self.args.full_reset and hasattr(self.envs, "terminated"):
self.envs.terminated[:] = True
self.envs.truncated[:] = True
obs, _ = self.envs.reset() # Need a starting observation
dead = t.zeros(self.args.num_envs, dtype=t.bool, device=device)
lifespan = t.zeros(self.args.num_envs, dtype=t.int32, device=device)
rollout.reset()
early_stop = self.args.early_stop
raise NotImplementedError()
info = {"lifespan": lifespan}
return rollout, info
def get_actions(
self, obs: Float[Tensor, " num_envs *obs_shape"]
) -> tuple[Int[Tensor, " num_envs *action_shape"], Float[Tensor, " num_envs"], Float[Tensor, " num_envs"]]:
"""
Computes the agents turn: given an observation for each environment,
sample the action the agent takes, along with the log_probs of that action,
and the entropy of the action distribution.
Use t.multinomial to sample the actions.
"""
raise NotImplementedError()
tests.test_get_actions(VPGAgent, PolicyNetwork)
tests.test_gen_rollout(VPGAgent, PolicyNetwork, VPGArgs, Rollout)
Solution
class VPGAgent:
"""Base Agent class handling the interaction with the environment."""
dead: Bool[Tensor, " num_envs"]
lifespan: Int[Tensor, " num_envs"]
def __init__(
self,
envs: gym.Env,
policy_network: PolicyNetwork,
args: VPGArgs,
rng: Optional[np.random.Generator] = None,
):
self.envs = envs
self.policy_network = policy_network
self.rng = rng
self.args = args
self.obs_shape = envs.observation_space.shape
self.action_shape = envs.action_space.shape
@t.no_grad()
def gen_rollout(self, rollout: Rollout) -> tuple[Rollout, dict[str, Any]]:
"""
Compute the full episode rollout for all environments in parallel, adding them to the rollout buffer.
It then returns the rollout buffer, and a dictionary of info contining the lifespan.
Returns `infos` (list of dictionaries containing info we will log).
"""
device = self.args.device
# Force a *full* reset so every env starts a fresh episode aligned to this rollout's window
# (otherwise the env's internal timestep persists across rollouts and survivors truncate
# mid-rollout). CartPole resets every env whose terminated|truncated flag is set.
if self.args.full_reset and hasattr(self.envs, "terminated"):
self.envs.terminated[:] = True
self.envs.truncated[:] = True
obs, _ = self.envs.reset() # Need a starting observation
dead = t.zeros(self.args.num_envs, dtype=t.bool, device=device)
lifespan = t.zeros(self.args.num_envs, dtype=t.int32, device=device)
rollout.reset()
early_stop = self.args.early_stop
for timestep in range(self.args.num_steps_per_rollout):
actions, logprobs, entropy = self.get_actions(obs)
new_obs, rewards, terminates, truncates, info = self.envs.step(actions)
# Mask returns at episode boundaries on EITHER termination or truncation: the env
# auto-resets on both, so returns must not bootstrap across the reset.
done = terminates | truncates
rollout.add_step(obs, actions, logprobs, rewards, done, info)
obs = new_obs
# Lifespan / convergence are about surviving (not terminating); truncation = success.
dead = dead | terminates
lifespan += ~dead
# Early stop: once every env has died at least once there is no more survival signal to
# gather this rollout, so cut it short. Near convergence survivors keep dead=False, so
# we still run the full num_steps_per_rollout (preserving the "survive 500" check).
if early_stop and (timestep % 16) == 15 and bool(dead.all()):
break
info = {"lifespan": lifespan}
return rollout, info
def get_actions(
self, obs: Float[Tensor, " num_envs *obs_shape"]
) -> tuple[Int[Tensor, " num_envs *action_shape"], Float[Tensor, " num_envs"], Float[Tensor, " num_envs"]]:
"""
Computes the agents turn: given an observation for each environment,
sample the action the agent takes, along with the log_probs of that action,
and the entropy of the action distribution.
Use t.multinomial to sample the actions.
"""
# Manual sampling instead of t.distributions.Categorical: this is the hot loop (run
# num_steps_per_rollout times per rollout), and Categorical's object creation adds large
# Python overhead per step. Entropy is unused here (it is recomputed in
# compute_logprobs_and_entropy for the loss), so we skip it entirely.
logits = self.policy_network(obs)
log_probs = F.log_softmax(logits, dim=-1)
actions = t.multinomial(log_probs.exp(), num_samples=1).squeeze(-1)
logprobs = log_probs.gather(-1, actions.unsqueeze(-1)).squeeze(-1)
# alternative logprobs = eindex(log_probs, actions, "env time [env time] -> env time")
return actions, logprobs, None
tests.test_get_actions(VPGAgent, PolicyNetwork)
tests.test_gen_rollout(VPGAgent, PolicyNetwork, VPGArgs, Rollout)
Returns
To compute the REINFORCE loss, we need to compute the return for each step in the trajectory. This gets a little messy as trajectories may be of different lengths, so an episode may have terminated part way through the rollout. You'll need to walk backward through the trajectory, and compute the return for each step.
Exercise - implement compute_returns
Compute the returns for each trajectory. Easiest to write as a simple reverse for-loop for now, though if you wish later on you can try a vectorized solution.
def compute_returns(
rewards: Float[Tensor, " num_envs num_steps"], done: Bool[Tensor, " num_envs num_steps"], gamma: float = 0.9
):
"""
ARGS:
rewards: The rewards for each trajectory
done: A boolean tensor indicating if an episode finished on the current timestep
gamma: The discount factor
Returns:
The returns G_t for each trajectory.
For example:
- If Rewards = [0, 0, 1, 0, 1]
- And Done = [0, 0, 1, 0, 1]
- Then Returns = [g**2, g, 1, g, 1]
"""
num_envs, num_steps = rewards.shape
returns = t.zeros_like(rewards)
raise NotImplementedError()
tests.test_compute_returns(compute_returns)
Solution
def compute_returns(
rewards: Float[Tensor, " num_envs num_steps"], done: Bool[Tensor, " num_envs num_steps"], gamma: float = 0.9
):
"""
ARGS:
rewards: The rewards for each trajectory
done: A boolean tensor indicating if an episode finished on the current timestep
gamma: The discount factor
Returns:
The returns G_t for each trajectory.
For example:
- If Rewards = [0, 0, 1, 0, 1]
- And Done = [0, 0, 1, 0, 1]
- Then Returns = [g**2, g, 1, g, 1]
"""
num_envs, num_steps = rewards.shape
returns = t.zeros_like(rewards)
G = t.zeros_like(rewards[:, 0]) # (num_envs)
for i in reversed(range(num_steps)):
G = rewards[:, i] + gamma * G * (~done[:, i])
returns[:, i] = G
return returns
tests.test_compute_returns(compute_returns)
Exercise - implement compute_logprobs_and_entropy
Computes the logprobs of actions taken, and the entropy of the action distribution on each timestep. Needed for the loss function.
def compute_logprobs_and_entropy(
tau: RolloutTensors, pi: PolicyNetwork
) -> tuple[Float[Tensor, " num_envs num_steps"], Float[Tensor, " num_envs num_steps"]]:
"""
Computes the logprobs and entropy of the action distribution on each timestep.
"""
raise NotImplementedError()
tests.test_compute_logprobs_and_entropy(compute_logprobs_and_entropy, PolicyNetwork)
Solution
def compute_logprobs_and_entropy(
tau: RolloutTensors, pi: PolicyNetwork
) -> tuple[Float[Tensor, " num_envs num_steps"], Float[Tensor, " num_envs num_steps"]]:
"""
Computes the logprobs and entropy of the action distribution on each timestep.
"""
logits = pi(tau.obs)
log_probs = F.log_softmax(logits, dim=-1)
log_probs_taken = eindex(log_probs, tau.actions, "env time [env time] -> env time")
probs = log_probs.exp()
entropy = -(probs * log_probs).sum(dim=-1)
return log_probs_taken, entropy
tests.test_compute_logprobs_and_entropy(compute_logprobs_and_entropy, PolicyNetwork)
Building up to the loss function
We need to compute the probability ratio $\pi(a_t | s_t) / \pi_{old}(a_t | s_t)$ for each timestep taken in the rollout. This is used to compute the importance weights $\text{iw}_t$, which allows us to learn off-policy. If args.clip_coef is not none, we also clamp the importance weights between 1 - args.clip_coef and 1 + args.clip_coef.
Exercise - implement compute_importance_weights
Keep the result numerically stable by exponentiating the difference between the logprobs.
Gradients should NOT flow through the importance weights. Make sure to use .detach() to prevent this.
def compute_importance_weights(logprobs_taken, tau: RolloutTensors, clip_coef: Optional[float]) -> t.Tensor:
"""
Compute importance weights from log probabilities.
Keeps the result numerically stable by exponentiating the difference between logprobs.
Gradients should NOT flow through the importance weights (uses .detach()).
Optionally clips the weights to [1 - clip_coef, 1 + clip_coef].
"""
raise NotImplementedError()
tests.test_compute_importance_weights(compute_importance_weights)
Solution
def compute_importance_weights(logprobs_taken, tau: RolloutTensors, clip_coef: Optional[float]) -> t.Tensor:
"""
Compute importance weights from log probabilities.
Keeps the result numerically stable by exponentiating the difference between logprobs.
Gradients should NOT flow through the importance weights (uses .detach()).
Optionally clips the weights to [1 - clip_coef, 1 + clip_coef].
"""
iw = t.exp(logprobs_taken - tau.logprobs).detach() # Detach to prevent gradient flow
if clip_coef is not None:
iw = t.clamp(iw, 1 - clip_coef, 1 + clip_coef)
return iw
tests.test_compute_importance_weights(compute_importance_weights)
Exercise - implement normalize_returns
Normalize the returns by ensuring zero mean, unit variance across all trajectories and timesteps. Don't overthink this one, should be a one-liner.
def normalize_returns(returns: Float[Tensor, " num_envs num_steps"]) -> Float[Tensor, " num_envs num_steps"]:
"""
Normalizes the returns by ensuring zero mean, unit variance across all trajectories and timesteps.
"""
raise NotImplementedError()
tests.test_normalize_returns(normalize_returns)
Solution
def normalize_returns(returns: Float[Tensor, " num_envs num_steps"]) -> Float[Tensor, " num_envs num_steps"]:
"""
Normalizes the returns by ensuring zero mean, unit variance across all trajectories and timesteps.
"""
return (returns - returns.mean()) / (returns.std() + 1e-8)
tests.test_normalize_returns(normalize_returns)
Exercise - implement compute_reinforce_loss
This should be easy with everything else you've got. The loss on timestep $t$ is
compute_loss before calling this function, controlled by args.normalize_returns. PPO uses a learned baseline called a critic, which we will see tomorrow. For now, the critic $b(s_t)$ is simply the average return for each trajectory, which we have already done in compute_returns.
The total loss is the mean of the losses over all timesteps, over all trajectories.
def compute_reinforce_loss(
returns: Float[Tensor, " num_envs num_steps"],
logprobs_taken: Float[Tensor, " num_envs num_steps"],
iw: Float[Tensor, " num_envs num_steps"],
) -> Float[Tensor, ""]:
raise NotImplementedError()
tests.test_compute_reinforce_loss(compute_reinforce_loss)
Solution
def compute_reinforce_loss(
returns: Float[Tensor, " num_envs num_steps"],
logprobs_taken: Float[Tensor, " num_envs num_steps"],
iw: Float[Tensor, " num_envs num_steps"],
) -> Float[Tensor, ""]:
adv = returns - returns.mean(dim=0, keepdim=True) # baseline per timestep across envs
return (iw * logprobs_taken * adv.detach()).mean()
tests.test_compute_reinforce_loss(compute_reinforce_loss)
Live training visualisation (optional)
To watch training, utils.py provides two helpers that render the first 16 environments of a
rollout as a 4x4 grid of cartpoles: utils.rollout_grid_frames(obs) returns the raw (T, H, W, 3)
frames, and utils.render_rollout_grid_html(obs) encodes them as a single autoplaying/looping MP4
(one ffmpeg encode, ~0.2s). The trainer logs these every video_log_freq rollouts — to wandb if
use_wandb, and/or inline if live_viz via VPGTrainer._log_video below.
Trainer
This is the function that will handle the full training loop. We've provided you with the template of a training loop which should be very similar to yesterday's.
Exercise - implement VPGTrainer
You should fill in the following methods. Ignore logging, can just copy from the solution later.
compute_loss- this method should compute the loss for the VPG objective function.
The training loop is rather standard once everything else is done: we do a rollout, we cut the result into batches, compute the loss, and update the weights from each batch, so we've provided it for you.
from part2_q_learning_and_policy_gradient.probe import Probe4, Probe5
class VPGTrainer:
def __init__(self, args: VPGArgs):
set_global_seeds(args.seed)
self.args = args
device = args.device
self.rng = t.Generator(device=device).manual_seed(args.seed)
self.run_name = f"{args.env_id}__{args.wandb_project_name}__seed{args.seed}__{time.strftime('%Y%m%d-%H%M%S')}"
if args.env_id == "CartPole-gpu":
self.envs = CartPole(args.num_envs, device=device)
elif args.env_id == "Probe4-v0":
self.envs = Probe4(args.num_envs)
elif args.env_id == "Probe5-v0":
self.envs = Probe5(args.num_envs)
else:
raise ValueError(f"Environment {args.env_id} not supported")
# Define some basic variables from our environment (note, we assume a single discrete action space)
self.num_envs = args.num_envs
self.action_shape = self.envs.action_space.shape
self.num_actions = self.envs.action_space.n
self.obs_shape = self.envs.observation_space.shape
# Create our networks & optimizer
self.policy_network = PolicyNetwork(self.obs_shape, self.num_actions).to(device)
# Compile the policy network for faster inference
if self.args.compile:
self.policy_network = t.compile(self.policy_network)
self.optimizer = t.optim.Adam(self.policy_network.parameters(), lr=args.lr, eps=1e-5, maximize=True)
self.optimizer.zero_grad()
# Create our agent
self.agent = VPGAgent(envs=self.envs, policy_network=self.policy_network, args=self.args, rng=self.rng)
def compute_loss(self, tau: RolloutTensors) -> tuple[t.Tensor, dict[str, Any]]:
raise NotImplementedError()
info = {
"entropy": avg_entropy.item(),
"r_joy": r_joy.item(),
"iw": iw.mean().item() if self.args.use_iw else None,
}
return joy, info
def _log_video(self, rollout: "Rollout", avg_lifespan: float, step: int):
"""Render the rollout's first 16 envs as a 4x4 cartpole grid and log it. This is how
`video_log_freq` works for VPG: the env is the batched GPU CartPole (no gym RecordVideo),
so we render the rollout we already have. Logs to wandb if use_wandb, and/or displays it
inline if live_viz (notebook). Reuses the rollout, so no extra env steps."""
if not (self.args.use_wandb or self.args.live_viz):
return # nowhere to send it; skip the work
try:
tau = rollout.get()
obs, dones = tau.obs, tau.dones # (num_envs, T, 4), (num_envs, T)
if self.args.use_wandb:
frames = utils.rollout_grid_frames(obs, dones=dones) # (T, H, W, 3)
# wandb.Video wants (T, C, H, W)
wandb.log({"rollout_video": wandb.Video(frames.transpose(0, 3, 1, 2), fps=50)}, step=step)
if self.args.live_viz:
from IPython.display import clear_output, display
clear_output(wait=True)
print(f"rollout {rollout.timestep} steps | avg lifespan "
f"{avg_lifespan:.1f}/{self.args.num_steps_per_rollout}")
display(utils.render_rollout_grid_html(obs, dones=dones))
except Exception as e: # never let visualization break training
print(f"[video log skipped: {e}]")
def update_learning_rate(self, time_steps, args):
if args.use_lr_decay and args.lr_frac > 0:
progress = min(1.0, max(time_steps / args.total_timesteps, 0) / args.lr_frac)
return (progress * args.lr_end) + ((1 - progress) * args.lr)
return args.lr
def train(self) -> None:
"""
Trains the agent by generating rollouts and updating the policy.
The progress bar tracks total environment steps.
"""
if self.args.use_wandb:
wandb.init(
project=self.args.wandb_project_name,
entity=self.args.wandb_entity,
name=self.run_name,
)
wandb.watch(self.policy_network, log="all", log_freq=50)
# --- Setup ---
rollout = Rollout(
num_envs=self.num_envs,
max_steps=self.args.num_steps_per_rollout,
obs_shape=self.obs_shape,
action_shape=self.action_shape,
device=self.args.device,
)
# Calculate the total number of rollouts to perform
env_steps_per_rollout = self.args.num_steps_per_rollout * self.args.num_envs
num_updates = self.args.total_timesteps // env_steps_per_rollout
train_steps = 0 # Counter for gradient updates
# --- Training Loop ---
# The progress bar is managed manually with a `with` statement.
# `total` is set to the total environment steps we want to run.
# The loop iterates `num_updates` times, not `total_timesteps` times.
with tqdm(
total=self.args.total_timesteps,
unit=" env steps",
unit_scale=True,
desc="Training",
miniters=1,
mininterval=0.02,
) as pbar:
env_steps_consumed = 0
for update_num in range(num_updates):
# 1. Generate a new rollout from the environment
rollout, agent_info = self.agent.gen_rollout(rollout)
# 2. Split the rollout into batches along the num_envs dimension
rollout_batches = rollout.get_batches(self.args.batch_size)
# 3. Logging and Progress Bar Update
# This part is outside the inner loop to only log once per rollout
avg_lifespan = agent_info["lifespan"].float().mean().item()
std_lifespan = agent_info["lifespan"].float().std().item()
max_lifespan = agent_info["lifespan"].max().item()
# Log a 4x4 grid video of the rollout every `video_log_freq` rollouts. This is what
# video_log_freq means for VPG (the GPU env has no gym RecordVideo) — see _log_video.
if self.args.video_log_freq and (update_num % self.args.video_log_freq == 0):
self._log_video(rollout, avg_lifespan, step=env_steps_consumed)
if (avg_lifespan + 0.5) > self.args.num_steps_per_rollout and std_lifespan < 0.01:
print("Agent has learned to play optimally!")
if self.args.video_log_freq:
self._log_video(rollout, avg_lifespan, step=env_steps_consumed)
break
# 4. Advance env-step counter before gradient updates (one rollout collected)
env_steps_consumed += self.args.num_steps_per_rollout * self.args.num_envs
# 5. For each batch, perform multiple gradient updates
for i in range(self.args.rollout_use_count):
for batch in rollout_batches:
loss, reinforce_info = self.compute_loss(batch)
info = {**agent_info, **reinforce_info}
loss.backward()
# clip_grad_norm_ returns the total (pre-clip) grad norm, so a single call
# both clips and gives us the value to log — no redundant second pass.
max_norm = self.args.max_grad_norm if self.args.max_grad_norm is not None else float("inf")
grad_norm = t.nn.utils.clip_grad_norm_(self.policy_network.parameters(), max_norm=max_norm)
self.optimizer.step()
self.optimizer.zero_grad()
train_steps += 1
new_lr = self.update_learning_rate(env_steps_consumed, self.args)
for pg in self.optimizer.param_groups:
pg["lr"] = new_lr
# Create info string to display in the progress bar
current_lr = self.optimizer.param_groups[0]["lr"]
info_dict = {
"joy": f"{info['r_joy']:.4f}",
"traj_len": f"{avg_lifespan:.2f} ± {std_lifespan:.2f} (max: {max_lifespan:.2f})",
"H": f"{info['entropy']:.4f}",
"iw": f"{info['iw']:.4f}" if self.args.use_iw else None,
"∇": f"{grad_norm:.4f}",
"lr": f"{current_lr:.2e}",
}
pbar.set_postfix(info_dict)
# Progress bar advances once per rollout (env steps actually collected)
pbar.update(self.args.num_steps_per_rollout * self.args.num_envs)
# --- Cleanup ---
self.envs.close()
if self.args.use_wandb:
wandb.finish()
tests.test_compute_loss(VPGTrainer, VPGArgs, Rollout)
Solution
from part2_q_learning_and_policy_gradient.probe import Probe4, Probe5
class VPGTrainer:
def __init__(self, args: VPGArgs):
set_global_seeds(args.seed)
self.args = args
device = args.device
self.rng = t.Generator(device=device).manual_seed(args.seed)
self.run_name = f"{args.env_id}__{args.wandb_project_name}__seed{args.seed}__{time.strftime('%Y%m%d-%H%M%S')}"
if args.env_id == "CartPole-gpu":
self.envs = CartPole(args.num_envs, device=device)
elif args.env_id == "Probe4-v0":
self.envs = Probe4(args.num_envs)
elif args.env_id == "Probe5-v0":
self.envs = Probe5(args.num_envs)
else:
raise ValueError(f"Environment {args.env_id} not supported")
# Define some basic variables from our environment (note, we assume a single discrete action space)
self.num_envs = args.num_envs
self.action_shape = self.envs.action_space.shape
self.num_actions = self.envs.action_space.n
self.obs_shape = self.envs.observation_space.shape
# Create our networks & optimizer
self.policy_network = PolicyNetwork(self.obs_shape, self.num_actions).to(device)
# Compile the policy network for faster inference
if self.args.compile:
self.policy_network = t.compile(self.policy_network)
self.optimizer = t.optim.Adam(self.policy_network.parameters(), lr=args.lr, eps=1e-5, maximize=True)
self.optimizer.zero_grad()
# Create our agent
self.agent = VPGAgent(envs=self.envs, policy_network=self.policy_network, args=self.args, rng=self.rng)
def compute_loss(self, tau: RolloutTensors) -> tuple[t.Tensor, dict[str, Any]]:
returns = compute_returns(tau.rewards, tau.dones, self.args.gamma) # (num_envs, timestep)
if self.args.normalize_returns:
returns = normalize_returns(returns)
logprobs_taken, entropy = compute_logprobs_and_entropy(tau, self.policy_network)
iw = compute_importance_weights(logprobs_taken, tau, self.args.clip_coef) if self.args.use_iw else t.ones_like(logprobs_taken)
r_joy = compute_reinforce_loss(returns, logprobs_taken, iw)
avg_entropy = entropy.mean()
joy = r_joy + self.args.ent_coef * avg_entropy
info = {
"entropy": avg_entropy.item(),
"r_joy": r_joy.item(),
"iw": iw.mean().item() if self.args.use_iw else None,
}
return joy, info
def _log_video(self, rollout: "Rollout", avg_lifespan: float, step: int):
"""Render the rollout's first 16 envs as a 4x4 cartpole grid and log it. This is how
`video_log_freq` works for VPG: the env is the batched GPU CartPole (no gym RecordVideo),
so we render the rollout we already have. Logs to wandb if use_wandb, and/or displays it
inline if live_viz (notebook). Reuses the rollout, so no extra env steps."""
if not (self.args.use_wandb or self.args.live_viz):
return # nowhere to send it; skip the work
try:
tau = rollout.get()
obs, dones = tau.obs, tau.dones # (num_envs, T, 4), (num_envs, T)
if self.args.use_wandb:
frames = utils.rollout_grid_frames(obs, dones=dones) # (T, H, W, 3)
# wandb.Video wants (T, C, H, W)
wandb.log({"rollout_video": wandb.Video(frames.transpose(0, 3, 1, 2), fps=50)}, step=step)
if self.args.live_viz:
from IPython.display import clear_output, display
clear_output(wait=True)
print(f"rollout {rollout.timestep} steps | avg lifespan "
f"{avg_lifespan:.1f}/{self.args.num_steps_per_rollout}")
display(utils.render_rollout_grid_html(obs, dones=dones))
except Exception as e: # never let visualization break training
print(f"[video log skipped: {e}]")
def update_learning_rate(self, time_steps, args):
if args.use_lr_decay and args.lr_frac > 0:
progress = min(1.0, max(time_steps / args.total_timesteps, 0) / args.lr_frac)
return (progress * args.lr_end) + ((1 - progress) * args.lr)
return args.lr
def train(self) -> None:
"""
Trains the agent by generating rollouts and updating the policy.
The progress bar tracks total environment steps.
"""
if self.args.use_wandb:
wandb.init(
project=self.args.wandb_project_name,
entity=self.args.wandb_entity,
name=self.run_name,
)
wandb.watch(self.policy_network, log="all", log_freq=50)
# --- Setup ---
rollout = Rollout(
num_envs=self.num_envs,
max_steps=self.args.num_steps_per_rollout,
obs_shape=self.obs_shape,
action_shape=self.action_shape,
device=self.args.device,
)
# Calculate the total number of rollouts to perform
env_steps_per_rollout = self.args.num_steps_per_rollout * self.args.num_envs
num_updates = self.args.total_timesteps // env_steps_per_rollout
train_steps = 0 # Counter for gradient updates
# --- Training Loop ---
# The progress bar is managed manually with a `with` statement.
# `total` is set to the total environment steps we want to run.
# The loop iterates `num_updates` times, not `total_timesteps` times.
with tqdm(
total=self.args.total_timesteps,
unit=" env steps",
unit_scale=True,
desc="Training",
miniters=1,
mininterval=0.02,
) as pbar:
env_steps_consumed = 0
for update_num in range(num_updates):
# 1. Generate a new rollout from the environment
rollout, agent_info = self.agent.gen_rollout(rollout)
# 2. Split the rollout into batches along the num_envs dimension
rollout_batches = rollout.get_batches(self.args.batch_size)
# 3. Logging and Progress Bar Update
# This part is outside the inner loop to only log once per rollout
avg_lifespan = agent_info["lifespan"].float().mean().item()
std_lifespan = agent_info["lifespan"].float().std().item()
max_lifespan = agent_info["lifespan"].max().item()
# Log a 4x4 grid video of the rollout every `video_log_freq` rollouts. This is what
# video_log_freq means for VPG (the GPU env has no gym RecordVideo) — see _log_video.
if self.args.video_log_freq and (update_num % self.args.video_log_freq == 0):
self._log_video(rollout, avg_lifespan, step=env_steps_consumed)
if (avg_lifespan + 0.5) > self.args.num_steps_per_rollout and std_lifespan < 0.01:
print("Agent has learned to play optimally!")
if self.args.video_log_freq:
self._log_video(rollout, avg_lifespan, step=env_steps_consumed)
break
# 4. Advance env-step counter before gradient updates (one rollout collected)
env_steps_consumed += self.args.num_steps_per_rollout * self.args.num_envs
# 5. For each batch, perform multiple gradient updates
for i in range(self.args.rollout_use_count):
for batch in rollout_batches:
loss, reinforce_info = self.compute_loss(batch)
info = {**agent_info, **reinforce_info}
loss.backward()
# clip_grad_norm_ returns the total (pre-clip) grad norm, so a single call
# both clips and gives us the value to log — no redundant second pass.
max_norm = self.args.max_grad_norm if self.args.max_grad_norm is not None else float("inf")
grad_norm = t.nn.utils.clip_grad_norm_(self.policy_network.parameters(), max_norm=max_norm)
self.optimizer.step()
self.optimizer.zero_grad()
train_steps += 1
new_lr = self.update_learning_rate(env_steps_consumed, self.args)
for pg in self.optimizer.param_groups:
pg["lr"] = new_lr
# Create info string to display in the progress bar
current_lr = self.optimizer.param_groups[0]["lr"]
info_dict = {
"joy": f"{info['r_joy']:.4f}",
"traj_len": f"{avg_lifespan:.2f} ± {std_lifespan:.2f} (max: {max_lifespan:.2f})",
"H": f"{info['entropy']:.4f}",
"iw": f"{info['iw']:.4f}" if self.args.use_iw else None,
"∇": f"{grad_norm:.4f}",
"lr": f"{current_lr:.2e}",
}
pbar.set_postfix(info_dict)
# Progress bar advances once per rollout (env steps actually collected)
pbar.update(self.args.num_steps_per_rollout * self.args.num_envs)
# --- Cleanup ---
self.envs.close()
if self.args.use_wandb:
wandb.finish()
tests.test_compute_loss(VPGTrainer, VPGArgs, Rollout)
Probes
As yesterday, we will be using probes to test our model. They've been implemented for you.
def test_probe(probe_idx: int):
"""
Tests a probe environment by training a network on it & verifying that the value functions are
in the expected range.
"""
# Train our network
args = VPGArgs(
env_id=f"Probe{probe_idx}-v0",
wandb_project_name=f"test-probe-{probe_idx}",
total_timesteps=[7500, 7500, 12500, 10000, 10000][probe_idx - 1],
lr=5e-3,
num_envs=4,
video_log_freq=None,
use_wandb=False,
device="cpu",
ent_coef=0.0,
clip_coef=None,
normalize_returns=False,
rollout_use_count=1,
show_probs=True,
)
trainer = VPGTrainer(args)
trainer.train()
agent = trainer.agent
# Get the correct set of observations, and corresponding values we expect
obs_for_probes = [[[0.0]], [[-1.0], [+1.0]], [[0.0], [1.0]], [[0.0]], [[0.0], [1.0]]]
expected_value_for_probes = [
[[1.0]],
[[-1.0], [+1.0]],
[[args.gamma], [1.0]],
[[1.0]],
[[1.0], [1.0]],
]
expected_probs_for_probes = [None, None, None, [[0.0, 1.0]], [[1.0, 0.0], [0.0, 1.0]]]
tolerances = [1e-3, 1e-3, 1e-3, 2e-3, 2e-3]
obs = t.tensor(obs_for_probes[probe_idx - 1]).to(args.device)
# Calculate the actual value & probs, and verify them
with t.inference_mode():
probs = agent.policy_network(obs).softmax(-1)
expected_probs = expected_probs_for_probes[probe_idx - 1]
if expected_probs is not None:
print(f"Probs: {probs}")
print(f"Expected probs: {t.tensor(expected_probs).to(args.device)}")
t.testing.assert_close(probs, t.tensor(expected_probs).to(args.device), atol=tolerances[probe_idx - 1], rtol=0)
print(f"Probe {probe_idx} tests passed!\n")
gym.envs.registration.register(id="Probe4-v0", entry_point=Probe4)
gym.envs.registration.register(id="Probe5-v0", entry_point=Probe5)
for probe_idx in [4, 5]:
test_probe(probe_idx)
Training Run
Vanilla Policy Gradient can often be a bit finicky and unstable to train (which is why in practice we use PPO instead). None-the-less, I've tried to find a good set of hyperparameters such that it trains in a minute or so. Running this should cause a grid of 4x4 videos to render in the notebook. The background flashes pink when the agent dies and is reset so you can easily see when a new episode starts.
Set
live_vis = True
if you want to see videos of the agetn as it trains in-line.
device = t.device("cuda")
args_fast = VPGArgs(
use_wandb=False,
num_envs=512,
num_batches_per_rollout=1,
total_timesteps=50_000_000,
num_steps_per_rollout=500,
rollout_use_count=1, # this seems to matter a lot
ent_coef=0.0, # didn't need this all along
clip_coef=0.1, # can sometimes work with no clipping, but it helps
max_grad_norm=1,
normalize_returns=False,
lr=1e-3, # risky!
use_lr_decay=True,
use_iw=False, # dont' need it if we only use each rollout once in one
lr_end=1e-3,
lr_frac=0.6,
compile=False,
gamma=0.99,
seed=1337,
device=device,
video_log_freq=10,
live_viz=False,
)
trainer = VPGTrainer(args_fast)
trainer.train()